本實驗室目前在人型機器人研究方面,主要著重在機器人之機構與控制演算法上面,為了達成機器人與人類或環境互動的目的,我們所設計的機械手掌與機械手臂都裝有力量感測之感應器,讓我們的機械手不會對於人類或是物體造成傷害。本實驗室所開發之機械手掌以及機械手臂如圖1以及圖2所示。
|
圖1本實驗室所研發出之機械手臂 |

|
圖2本實驗室所研發出之機械手掌 |
下圖3是本實驗室設計之三指機械手,此機械手三個主動的自由度和五個被動的自由度,使用三顆DC有刷馬達並經由鋼線把動力傳送到每一隻手指頭上面。在抓取物體的方面,此手掌三個自由度已經足以抓取大部分簡單型狀的物體。
|
圖3本實驗室設計之三指機械手 |
在人型機器人之軌跡規劃上,本實驗室利用機器人重心與腳底壓力中心之關係建立機器人的倒單擺模型,利用此模型生成機器人穩定步行之軌跡,圖4為機器人在行走時所量測到的腳底壓力中心與機器人重心軌跡。
|
圖4 腳底壓力中心與機器人重心軌跡 |
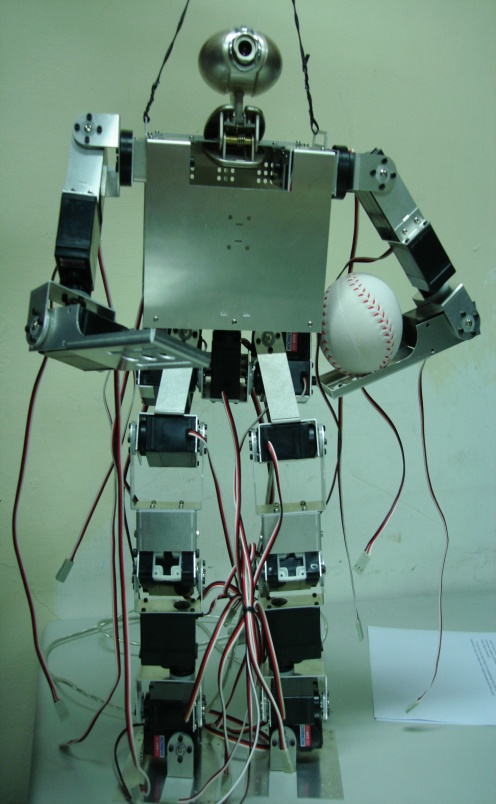
下圖5為本實驗室利用RC馬達所設計出的小型雙足機器人,經由腳底板的四片力量感測器,傳入matlab simulink運算,我們可以藉此算出腳底板ZMP的位置。藉著倒單擺模型,我們可以找到機器人重心的軌跡,藉著用COG軌跡計算Inverse Kinematics,我們可以藉由MATLAB Simulink在ADAMS中控制機器人。
|
圖5 本實驗室設計之小型雙足機器人 |
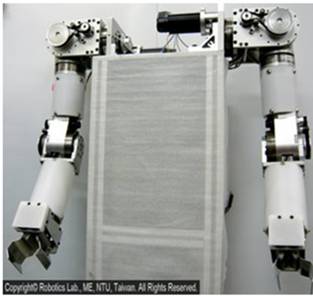
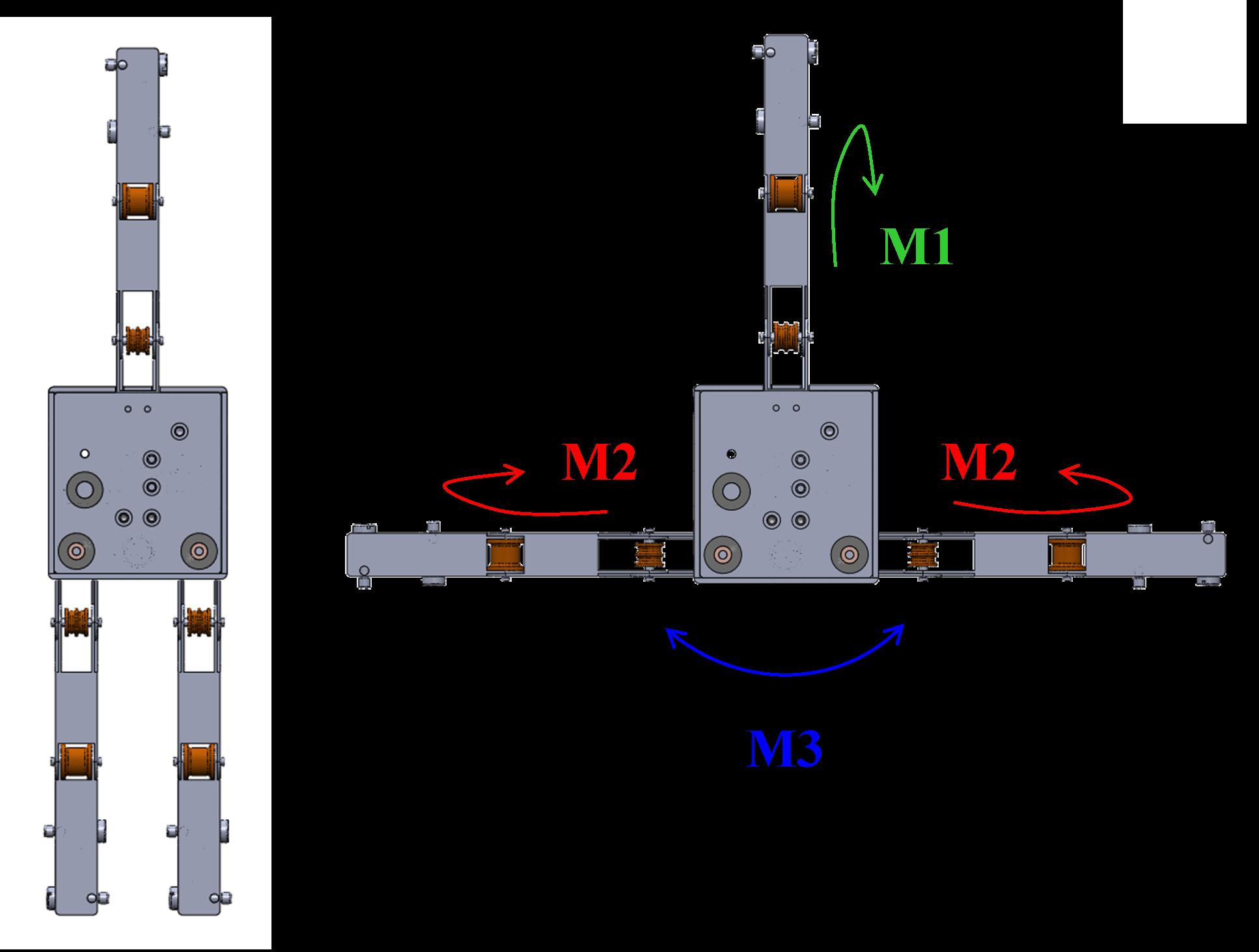
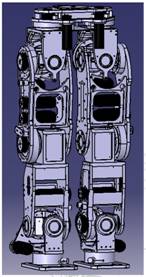
針對機械腳的設計,本實驗室利用Catia以及Solidworks完成機構設計以及其應力分析,應力分析最主要的目的在於將機構比較脆弱的地方預先找出,讓我們不會在機構加工完以後,正式使用與測試我們的機構的時候才發現這些弱點,減少設計以及修改的時間並且節省經費。 圖6為我們所設計之機械腳。
|
圖6 機械腳之機構設計 |
未來方向
未來本實驗室在人型機器人之發展上將致力於全身協調控制以及人機互動之發展,期望未來機器人更能夠融入人類世界中,發揮更大的效益。
|



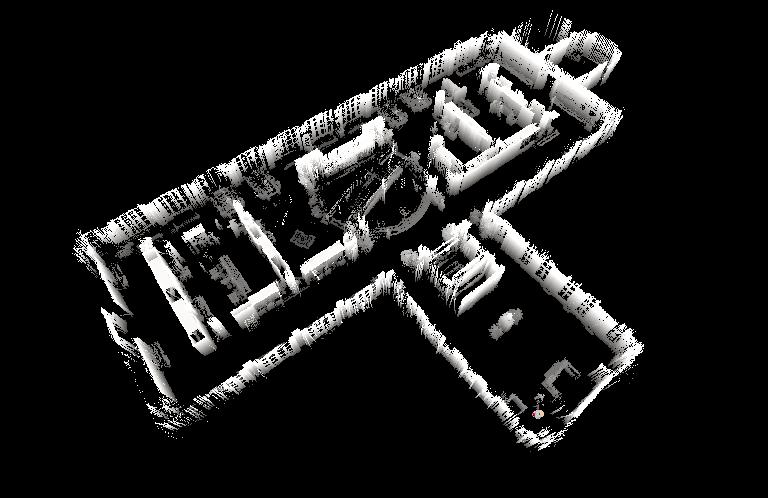 圖1 校史館二樓2.5D地圖
圖1 校史館二樓2.5D地圖